|
I am a Ph.D student in the Department of Electronic Engineering at Tsinghua University, advised by Prof. Yueqi Duan. Before that, I obtained my B.Eng. in the Department of Engineering Physics, Tsinghua University. My research interest lie in 3D computer vision and world model. Feel free to contact me if you are interested in our works or would like to work with us. |
|
|
*Equal contribution †Project leader |
|
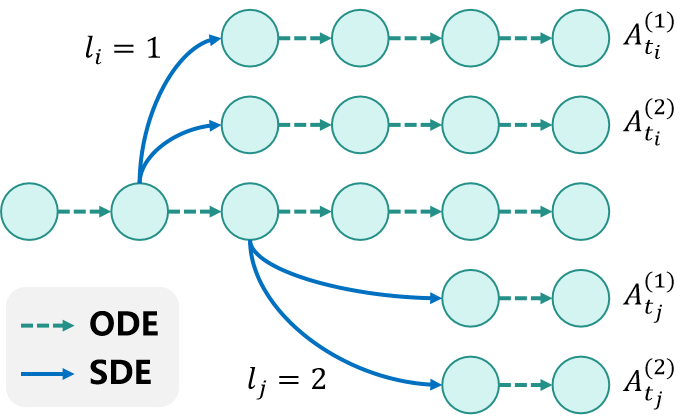
Shengjun Zhang, Zhang Zhang, Chensheng Dai, Yueqi Duan IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR Findings), 2026 [Paper] [Code] [Model] We provide a comprehensive entropy-based analysis of denoising timesteps in GRPO training process, revealing that effective alignment can be achieved by optimizing exclusively at high-entropy steps. We propose E-GRPO, an entropy aware Group Relative Policy Optimization to increase the entropy of SDE sampling steps. |
|
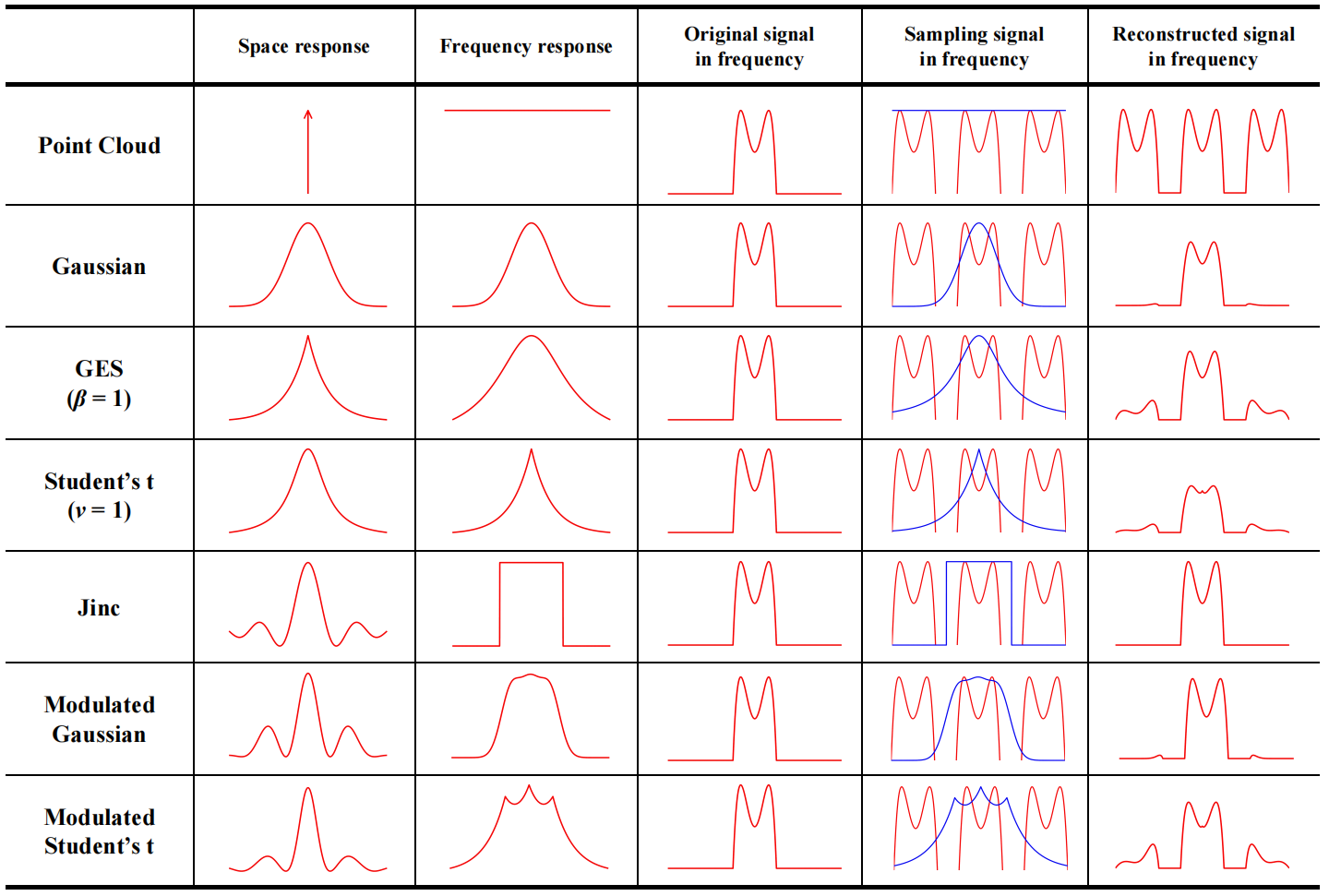
Shengjun Zhang*, Min Chen*, Yibo Wei Mingyu Dong, Yueqi Duan IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2026 [Paper] we revisit 3D reconstruction from the perspective of signal processing, identifying the periodic spectral extension induced by discrete sampling as the fundamental challenge. |
|
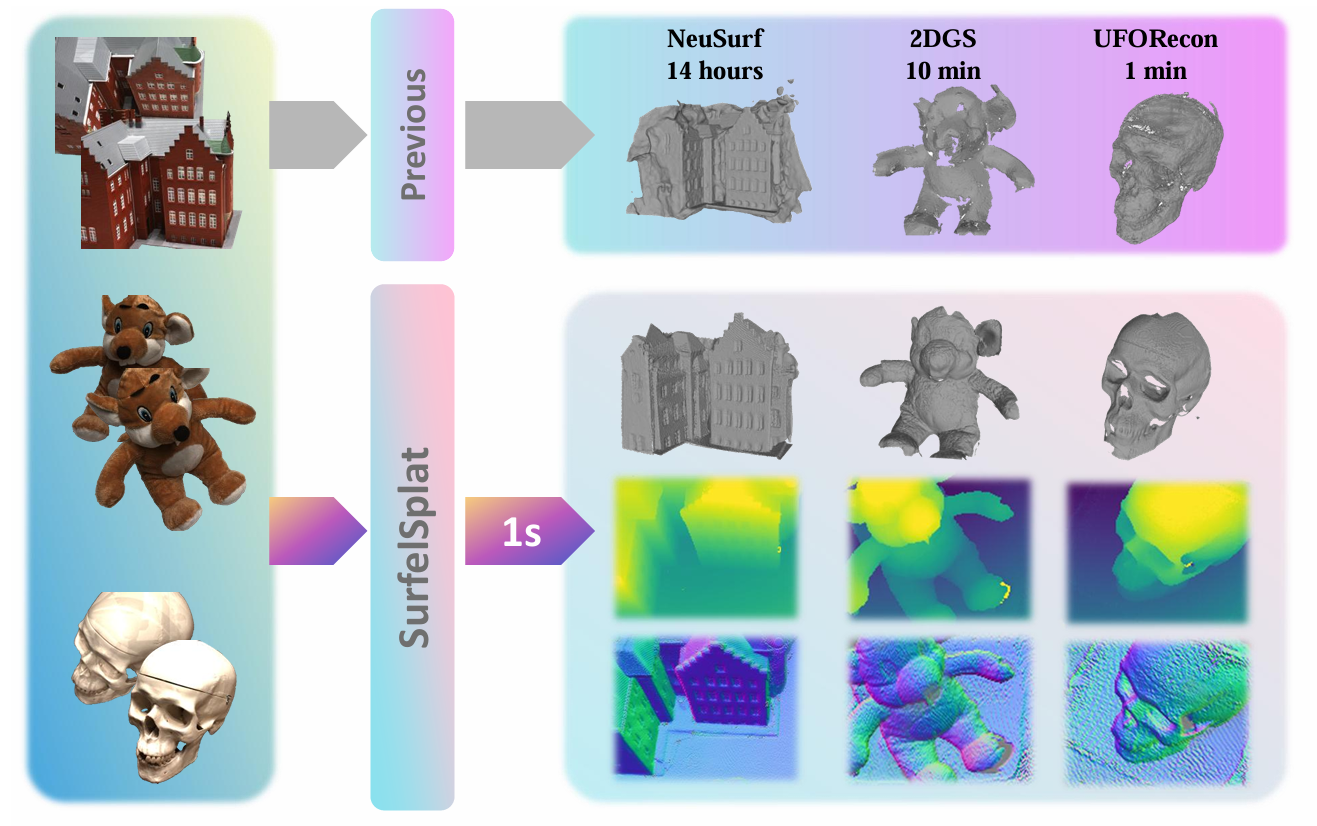
Chensheng Dai*, Shengjun Zhang*, Min Chen, Yueqi Duan Thirty-ninth Conference on Neural Information Processing Systems (NeurIPS), 2025 [Paper] We observe that conventional feed-forward structures struggle to recover accurate geometric attributes of Gaussian surfels because the spatial frequency of pixel-aligned primitives exceeds Nyquist sampling rates. We propose SurfaceSplat, a feed-forward framework that generates efficient and generalizable pixel-aligned Gaussian surfel representations from sparse-view images. |
|
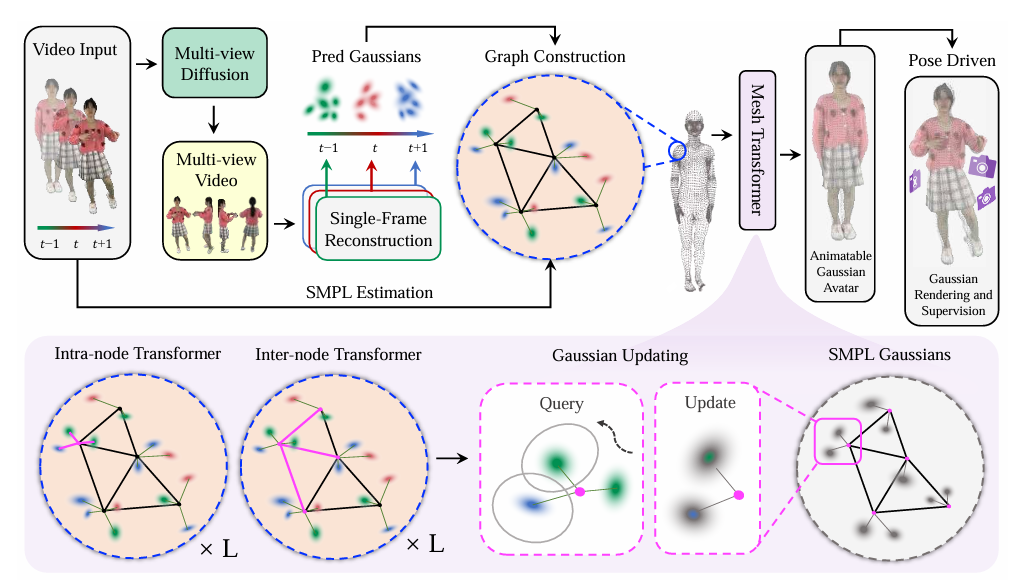
Yifan Liu*, Shengjun Zhang*, Chensheng Dai, Yang Chen, Hao Liu, Chen Li, Yueqi Duan IEEE/CVF International Conference on Computer Vision (ICCV), 2025 [Paper] [Code] [Project Page] In this paper, we propose Human Gaussian Graph (HGG) to generate generalizable and animatable Gaussian representations. We leverage the human structure prior to recover generalizable and animatable Gaussian representations |
|
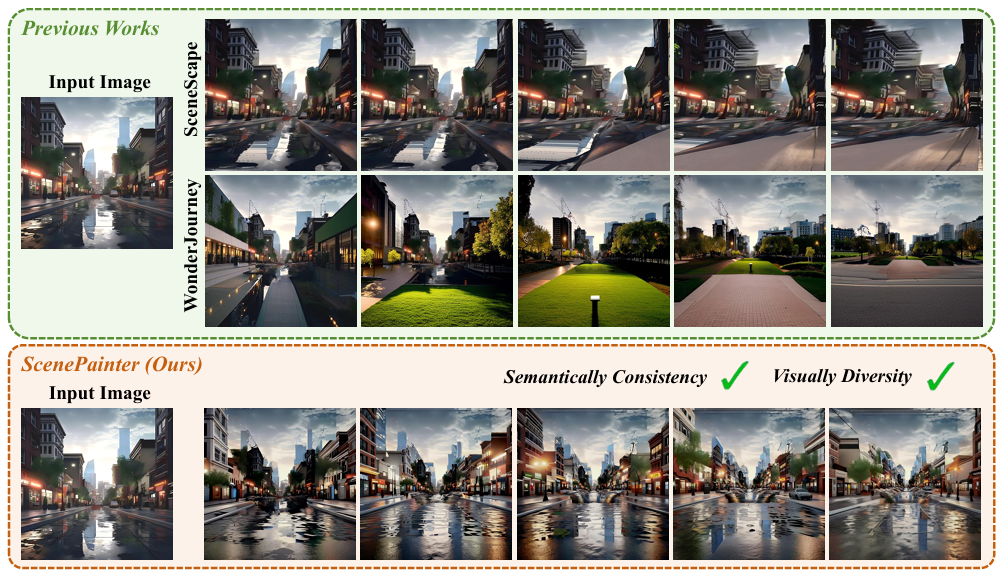
Chong Xia, Shengjun Zhang, Fangfu Liu, Chang Liu, Khodchaphun Hirunyaratsameewong, Yueqi Duan IEEE/CVF International Conference on Computer Vision (ICCV), 2025 [Paper] [Code] [Project Page] In this paper, we propose ScenePainter, a new framework for semantically consistent 3D scene generation, which aligns the outpainter's scene-specific prior with the comprehension of the current scene. |
|
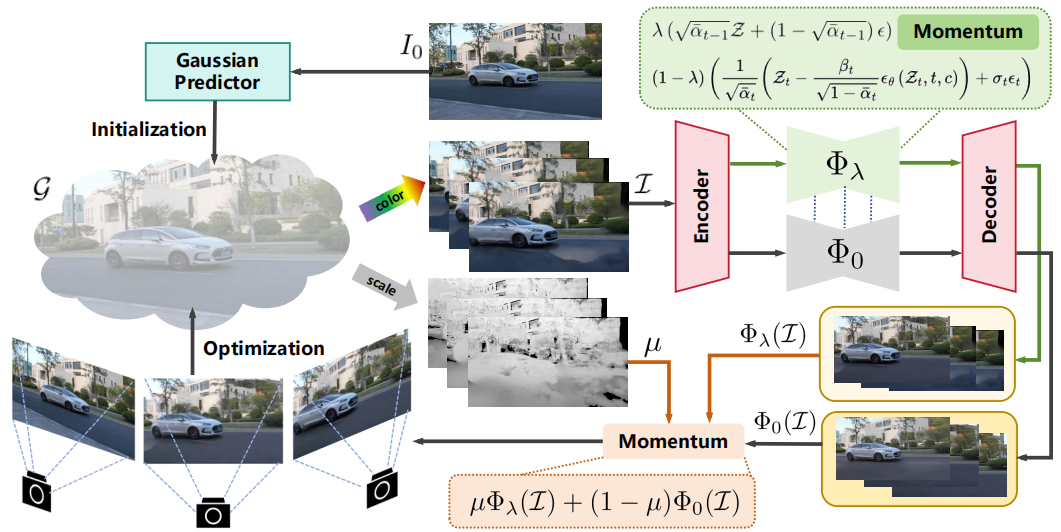
Shengjun Zhang, Jinzhao Li, Xin Fei, Hao Liu, Yueqi Duan IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2025 [Paper] [Code] [Project Page] In this paper, we propose Scene Splatter, a momentum 3D scene generation paradigm to introduce existing scene information as momentum in the generation process, to balance the generative prior and scene consistency. |
|
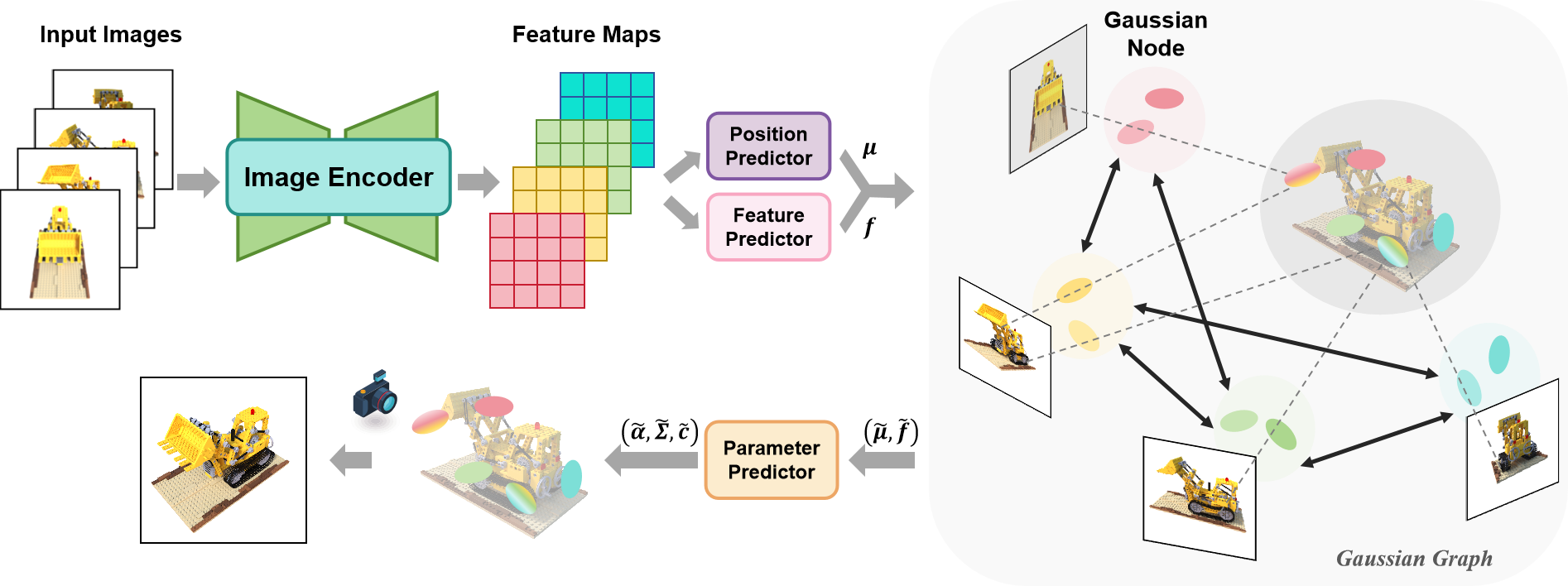
Shengjun Zhang, Xin Fei, Fangfu Liu, HaiXu Song, Yueqi Duan Thirty-eighth Conference on Neural Information Processing Systems (NeurIPS), 2024 [Paper] [Code] [Project Page] In this paper, we propose Gaussian Graph Network (GGN) to generate efficient and generalizable Gaussian representations. |
|
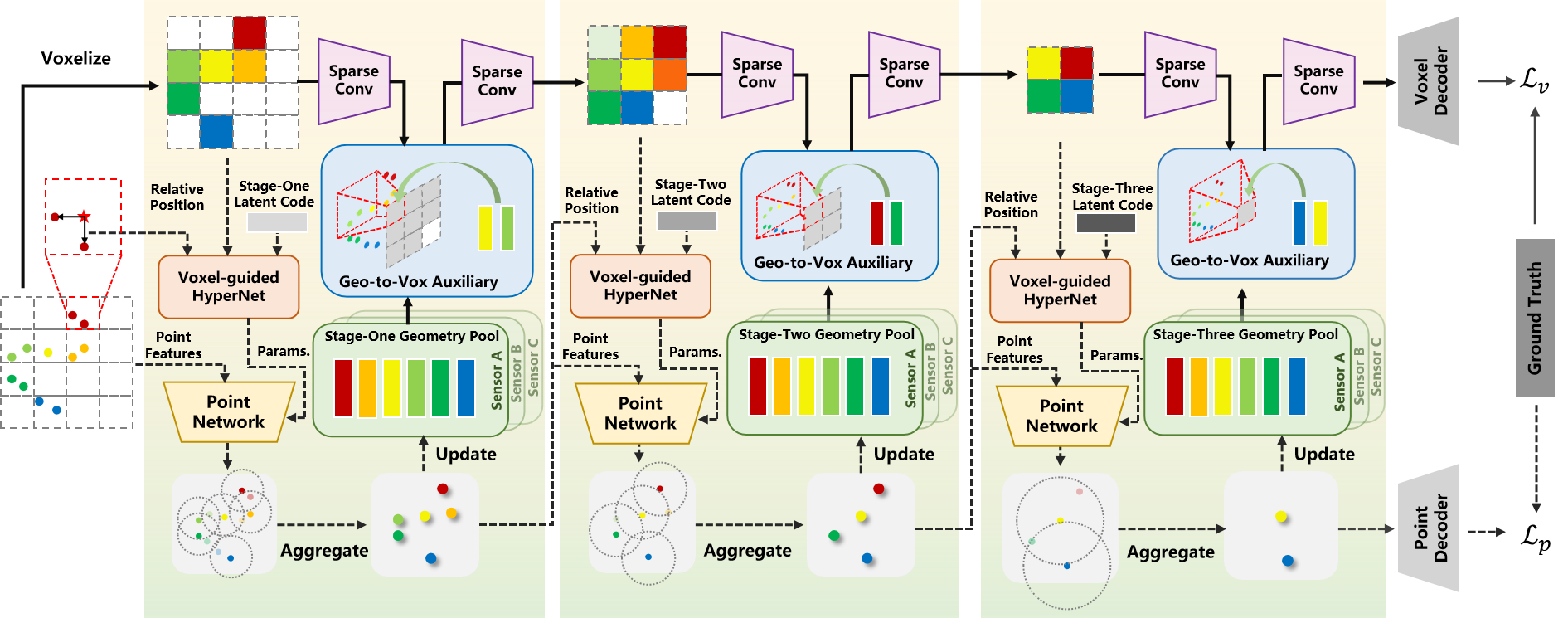
Shengjun Zhang, Xin Fei, Yueqi Duan IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2024 [Paper] [Code] In this paper, we propose geometry-to-voxel auxiliary learning to enable voxel representations to access point-level geometric information, which supports better generalisation of the voxel-based backbone with additional interpretations of multi-sensor point clouds. |
|
|
|
|
|
|
© Shengjun Zhang | Last update: Mar. 1, 2025